1. What the problem to solve?
春节回去的时候正好碰上DeepSeek发布新的模型,一时间各路媒体讨论的沸沸扬扬,几乎上升到国运的高度。讨论的最重要的应该是两点:第一个是媲美其他主流模型的benchmark分数;第二个是说训练速度快了很多,使用了少的多的GPU时间。可是各路讨论多是繁华之论以及振奋人心的消息,而没有具体的DS为什么好,怎么好的。回来的第一个周末,花了周末的时间读了一下DS V3的论文。之所以选择V3因为R1是之于V3进行了RL和SFT来增强模型的推理能力,基本的模型还是V3,而且DS V3的论文也更详细。文章的第二部分讲述了DS在模型的架构上(science)有一些什么样的改进,第三部分讲述了在模型的训练上(engineering)有什么改进,然后两部分讲了pretraining和posttraining以及evaluation相关的东西。
2. How to solve / Model architecture?
2.1. Basic Architecture
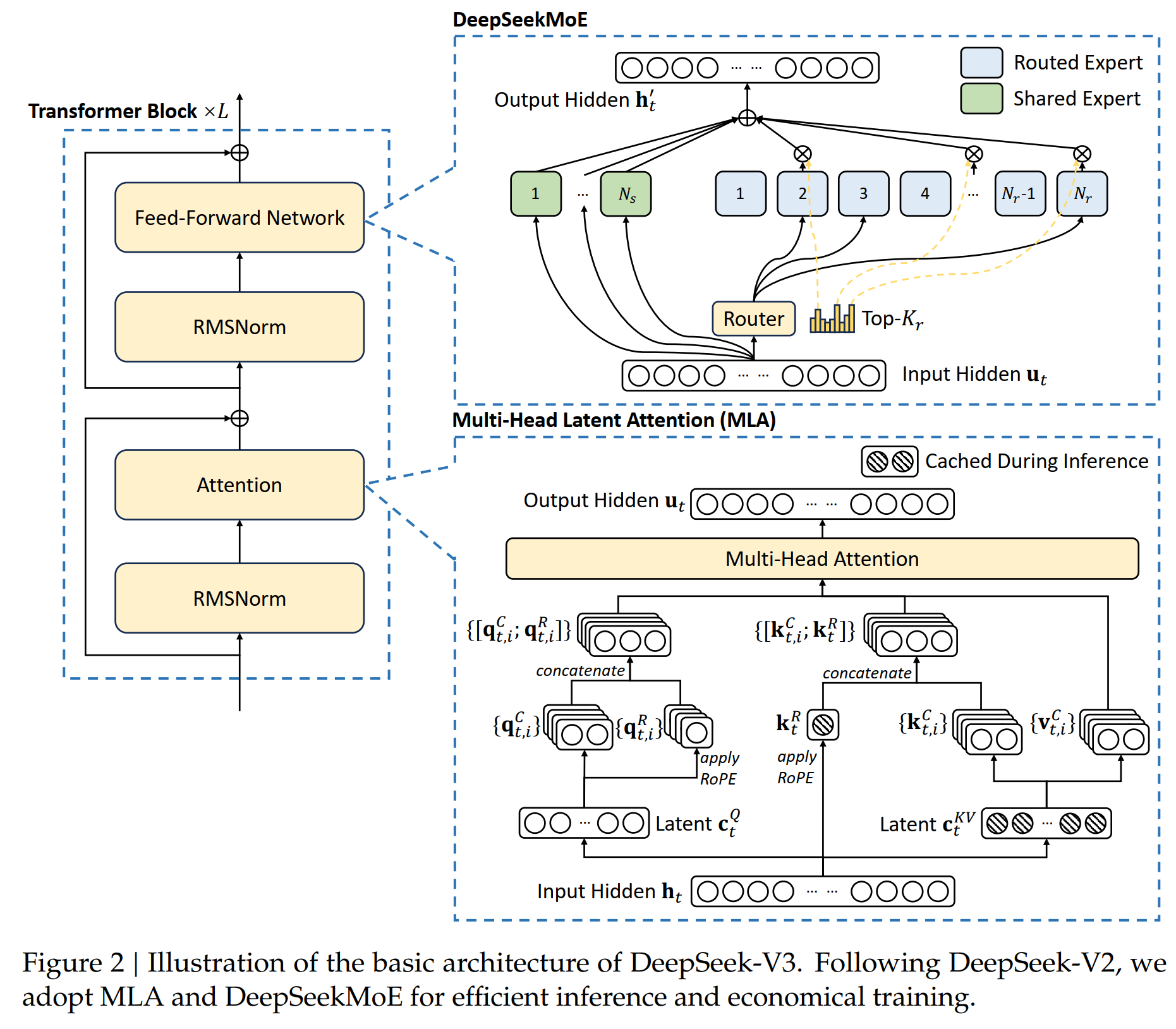
模型的基本架构里面主要有两点:1是把原来的Attention改成了Multi-head Latent Attention;2是把原来的FFN改成了DeepSeekMoE。这样做的目的一是减少了计算量;二是减少了cache的data,从而节约了GPU的内存。具体如下:
DeekSeek模型架构
2.1.1. Multi-head latent attention (MLA)
相比较于原始的Attention模型里面介绍的注意力机制, DS使用Multi-head latent attention (MLA)的架构,跟原来的Multi-head attention不一样的是这里面从 \(h_t\) 来计算 \(k, q, v\) 的时候,先进行降维,把 \(h_t \in \mathbb{R}^d\) 投影到一个低维空间 \(\textcolor{blue}{c_t^{KV} = W^{DKV} h_t}\) ,然后再升维到 \(\textcolor{blue}{k_t^C=W^{UK}c_t^{KV}}\) ;以及投影到一个低维的 \(\textcolor{blue}{c_t^Q=W^{DQ}h_t}\),然后再升维到 \(\textcolor{blue}{q_t^C = W^{UQ} c_t^Q}\)。这样的话在进行inference的时候只要保存低维的 \(\textcolor{blue}{c_t^{KV}}\) 和 \(\textcolor{blue}{c_t^Q}\). 比如说,原来的 \(\text{dim}(h_t) = 7168\), 通过一个降维矩阵 \(\text{dim}(W^{DKV})=4096 \times 7186\)把它降到4096维,那么需要保存的矩阵 \(\textcolor{blue}{c_t^{KV}}\)就小了很多。 具体地说,
这里 \(W^{DKV} \in \mathbb{R}^{d_c \times d}\) 是一个降维投影矩阵; \(W^{UK}, W^{UV} \in \mathbb{R}^{d_h n_h \times d_c}\) 是对应的 keys 和 values 的升维矩阵。在做inference的时候,只需要\(\textcolor{blue}{c_t^{KV}}\)和\(\textcolor{blue}{k_t^R}\),即节省了计算量,也节约了内存。
对Query,也有同样的处理来降维
2.1.2. DeepSeekMoE with Auxiliary-Loss-Free Load Balancing
Basic Architecture of DeepSeekMoE
在2017年的Attention论文里面,decoder先是计算Attention,然后再计算FFN从而predict最后的token。DS里面,FFN被进一步改成了MoE。MoE的意思是模型是由一些列的Expert构成。每个Expert可以是一个MLP,一个CNN或者其他的神经网络模型,或者每个Expert可以是一个tansformer的encoder/decoder。每个 Expert 负责学习不同的数据模式,MoE 通过 Gating Network 选择合适的Expert,使得不同的数据被送往最擅长Expert家处理。每预测下一个token的时候,MoE不是使用某一个Expert,也不是使用所有的Expert,而是选择其中的Top \(K\) 个Expert来进行预测。选哪 \(K\) 个Expert是通过一个Gating网络来确定。通常 \(K \ll N\),所以MoE是一个稀疏网络。使用MoE第一个好处是通过更精细化的划分,模型有更大的灵活性,不同的Expert可以学习不同的数据。比如如果 \(N=16\),\(K=2\),那么就有 \(C(16, 2)=160\) 个组合。如果每个Expert再split成4个小的Expert,那么总共的组合就是 \(C(64, 8)=4,426,165,368\)。这样极大的增加了模型的灵活性。第二个好处是节省计算资源,因为每次只需要激活很少的Expert来参加计算,而不像transfomer那样所有的参数都参加计算。也就是说,MoE可以训练一个更大更多参数的模型,从而记住更多的知识,但是每次实际只有很少一部分参数参加计算。而且应为每个Expert是独立的模型,没有共享参数,所以他们可以并行进行计算。
MoE的架构见下图
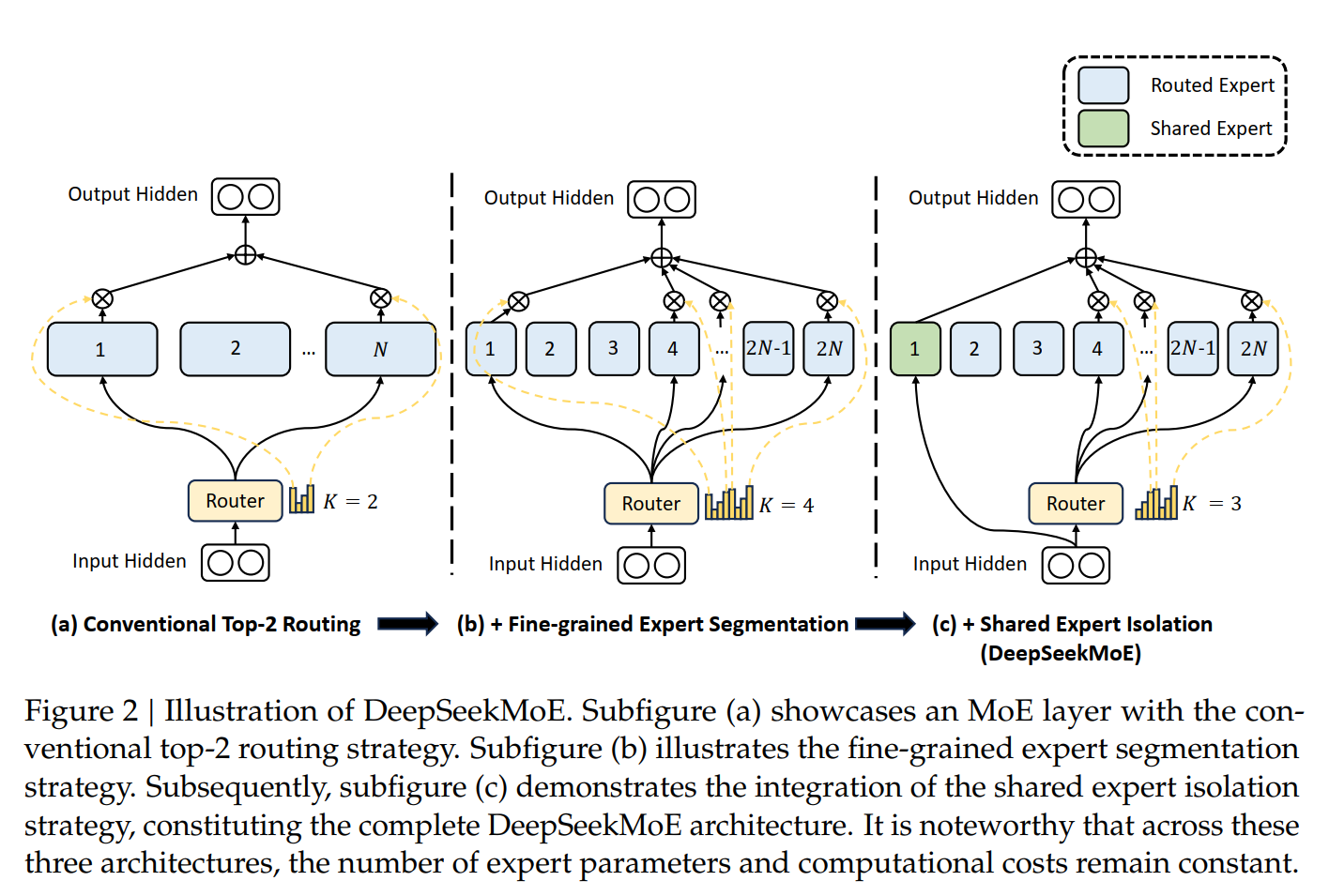
在DS的FFN里面,DeepSeekMoE在MOE的基础上更进一步:1)他们把Expert进一步细化,然后既有一些Expert用来做routing,具体地说,对routingd的Expert,预测只是route到这些Expert的某一些上面。同时,他们还有一些Expert是共享Expert,也就是说,在预测的时候,他们每次都是被使用。2)DS优化了Expert的选择,使用affinity score来选择专家。3)DS的Expert更finer,同时也更稀疏。这样进一步降低了运算成本。
DeepSeekMoE的架构见下图
假设每个Expert \(i\) 的中心是 \(\mathbf{e}_{i}\),首先计算 \(\textcolor{blue}{s_{i,t} = \sigma(\mathbf{u}_t^\top \mathbf{e}_i)}\) 作为 token \(t\) 与 Expert \(i\) 的相似度: \(\mathbf{e}_i\) 作为Expert \(i\) 的中心向量,通过与token的输入 \(\mathbf{u}_t\) 进行点积,再经过 sigmoid 计算出 token 对该Expert的 affinity,从而决定 token 是否被路由到该Expert。
\(g^{\prime}_{i,t}\) 是Expert \(i\)的gating value,根据所有的Expert的 \(s_{i,t}\)的值,来选择最高的 \(K_r\)个。
然后算出这 \(K_r\)个Expert的权重 \(\textcolor{blue}{g_{i,t} = \frac{g^{\prime}_{i,t}}{\sum_{j=1}^{N_r} g'_{j,t}}}\)。尽管这儿的公式看分母是 \(N_r\) 个 \(g'_{i,t}\) 相加,但是实际上有 \(N_r - K_r\) 个为0.
最后得到新的output为 \(\textcolor{blue}{\mathbf{h}'_t = \mathbf{u}_t + \sum_{i=1}^{N_s} \text{FFN}^{(s)}_i(\mathbf{u}_t) + \sum_{i=1}^{N_r} g_{i,t} \text{FFN}^{(r)}_i(\mathbf{u}_t)}\). 注意的是,这里面从 \(N_r\) 个Expert里面选择了 \(K_r\)个来进行计算,\(K_r \ll N_r\),从而节约了大量的计算。同时,相比较于一般的MoE,DS使用了 \(N_s\)个 shared Expert,这些Expert参加所有的token的运算。通过引入共享专家,模型可以在不同任务之间共享通用知识,避免每个专家都独立学习相似的内容,从而减少了知识冗余。
Auxiliary-Loss-Free Load Balancing in DeepSeek-V3
实际运行的时候,可能会出现这种情况:模型的token大部分都是有某几个Expert来predict,剩下来的Expert使用率会比较少,导致Expert负载不均衡。以前的MOE使用auxiliary loss来让Expert负载均衡。通过惩罚imbalanced Expert utilization (加上更多的loss)来来达到均衡负载的目的。但是这样做有两个问题:1)Too strong auxiliary loss hurts model performance by interfering with learning objectives. 2)Difficult to tune: Balancing between efficiency and accuracy requires careful hyperparameter tuning.
DS提出了Auxiliary-Loss-Free Load Balancing来达到balanced routing of tokens to different Experts.具体的说实在gating function里面添加一个bias的项,通过bias的值来平衡Expert的调用。
具体的说,在计算权重\(g'_{i,t}\)的时候,对每个token和Expert的affinity score都添加了一个bias \(b_i\),变成\(s_{i,t} + b_i \in \text{Topk}(\{s_{j,t} + b_j | 1 \leq j \leq N_r\}, K_r)\), 当某个Expert \(j\)出现overload的时候,就把对应的\(b_j\)减小\(\gamma\) 。这样的话新的\(s_{j,t} + b_j\)就会减小一点,这样的话 \(\textcolor{blue}{Top k}\) 个选择的时候这个Expert就会排名靠后一点,更可能不会被选中因为\(g'_{i,t} = 0\)。
Complementary Sequence-Wise Auxiliary Loss
DeepSeek-V3 主要依赖 Auxiliary-Loss-Free 负载均衡策略来确保 Experts 间的负载均衡。然而,为了防止单个序列内部的极端不平衡,DeepSeek-V3 还引入了 Complementary Sequence-Wise Auxiliary Loss. 通常MoE模型的负载均衡都在batch level进行,但是对一个batch的多个sequence,某个sequence 内部某些Expert可能用的很多,而其他Expert用的很少。DS的想法是要在每个sequence level,也尽可能的让Expert utilization均衡,负载不会过于集中或稀疏。同时该损失的强度非常低,以避免对模型性能产生负面影响。
下面我们主要来理解原文中的公式,为什么这个公式就能够均衡 Sequence level的Expert 负载。
\(P_i\)是看在 sequence 上面 Expert 的使用是不是比较均衡。如果不均衡的话,\(P_i\)的值就会比较大。具体原因:首先看\(s^{\prime}_{i,t}\) 和 \(P_i\)。对归一化的affinity score \(s^{\prime}_{i,t} = \frac{s_{i,t}}{\sum_{j=1}^{N_r} s_{j,t}}\), 计算Expert \(i\) 在整个sequence (Sequence 的长度为 \(T\)) 上面的的平均得分 \(P_i = \frac{1}{T} \sum_{t=1}^{T} s^{\prime}_{i,t}\): 如果Expert \(i\) 在sequence的很多token \(t\)上被选中,那么对应的 \(s_{i,t}\) 就会被其他的\(s_{j,t}\)大 (\(s_{i,t} \gg s_{j,t}\) for \(j \neq i\)), 而 \(s^{\prime}_{i,t}\) 是 \(s_{i,t}\)对所有的 Expert的归一化值,那么\(s^{\prime}_{i,t}\)就相应的比较大。而\(P_i\)是\(s^{\prime}_{i,t}\)在整个 sequence 上的平均值,所以它也会比较大。最后相对应的损失函数 \(\mathcal{L}_{\text{Bal}} = \alpha \sum_{i=1}^{N_r} f_i P_i\) 就比较大。
\(f_i\) 是 Expert \(i\) 被使用的频率的归一化值。公式 \(f_i = \frac{N_r}{K_r T} \sum_{t=1}^{T} \mathbb{1} \left(s_{i,t} \in \text{Topk}(\{s_{j,t} | 1 \leq j \leq N_r\}, K_r) \right)\) 统计了每个 Expert \(i\) 在当前序列 \(T\) 个token中被使用的频率 (\(\sum_{t=1}^{T} \mathbb{1} \left(s_{i,t} \in \text{Topk}(\{s_{j,t} | 1 \leq j \leq N_r\}, K_r) \right)\)),然后做了归一化 \(\frac{N_r}{K_r T}\). 同样,如果 Expert \(i\) 在这个 sequence 中被调用的次数很多,那么这个值也会更大。
最后,损失函数公式里的 \(\alpha\) 是个取值很小的超参数。它的值很小是为了不过度影响主要训练目标。
2.2. Multi-Token Prediction (MTP)
DS还使用了MTP,而不是像一般的pre-training那样仅仅只预测 next token(2017的Attention文章就是只predict next token)。这有两个好处:1. 同时预测多个token可以提高data的使用效率。2. 让模型在准备representation的时候能够考虑的更长远。跟原始的MTP文章不同的是,DS不是同时predict \(D\) 个token (输出一个 \(D \times V\) 的矩阵, 其中 \(V\) 是词表大小); 换个表达方式,对应的prediction 和损失函数是 \(L_n = -\sum_t \log P_{\theta} (x_{t+n:t+1} \mid x_{t:1})\). DS是sequentially predict additional token。
MTP from Gloeckle et al. (2024), which is \(D \times V\) 的矩阵
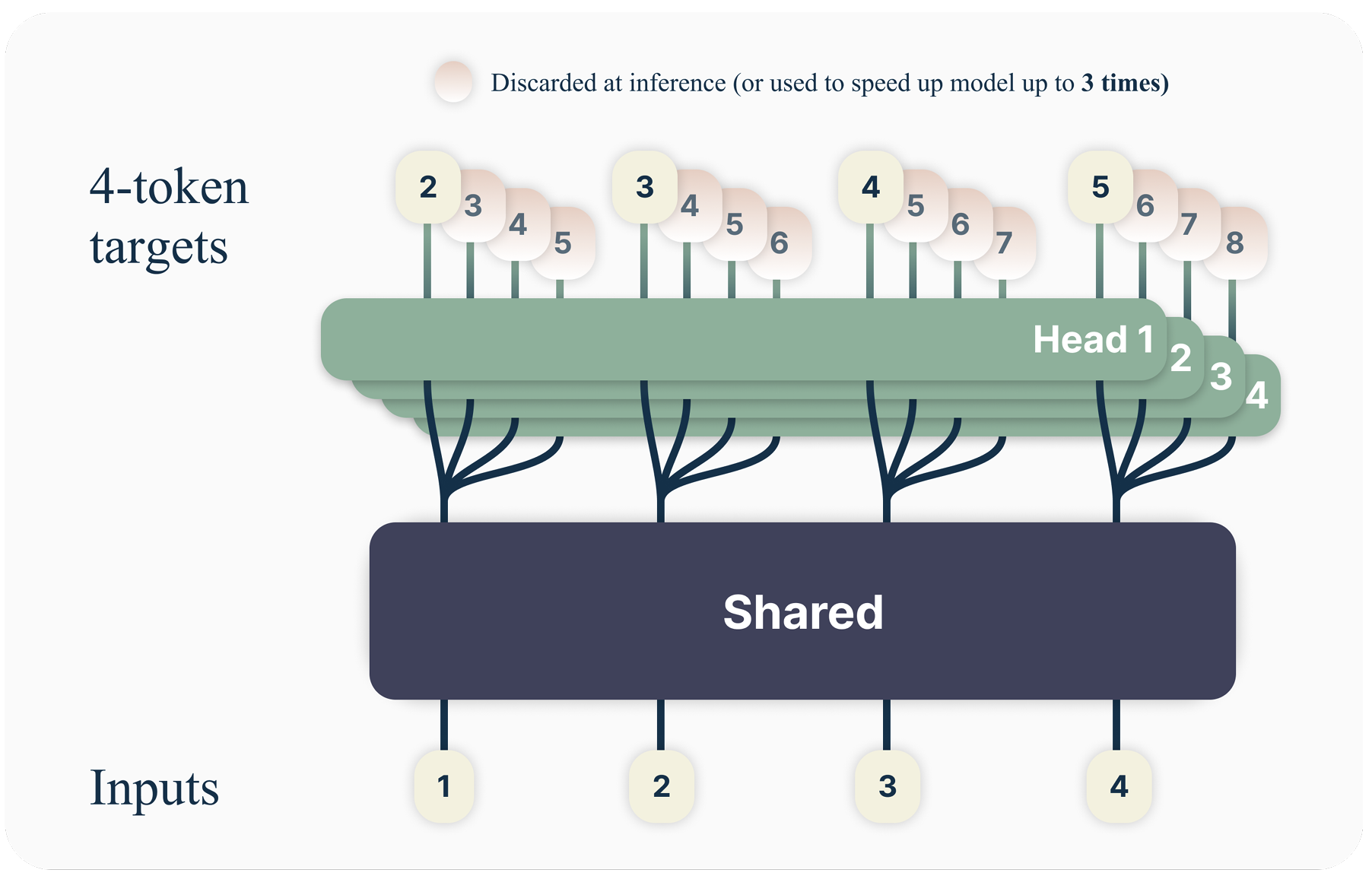
DS的MTP模块结构用一句话来简单概括就是:DS的MTP使用 \(D\) 个sequential modules来预测 \(D\) 个tokens。这 \(D\) 个modules 共享 embedding \(\text{Emb}(\cdot)\),共享输出头 \(\text{OutHead}(\cdot)\) 。 第 \(k\) 个token的 MTP 模块有一个专用的 transformer 块 \(\text{TRM}_k(\cdot)\),以及一个投影矩阵 \(M_k \in \mathbb{R}^{d \times 2d}\)
DeepSeek V3 MTP: Use D MTP module and \(k\)-th module predict \(k\)-depth token
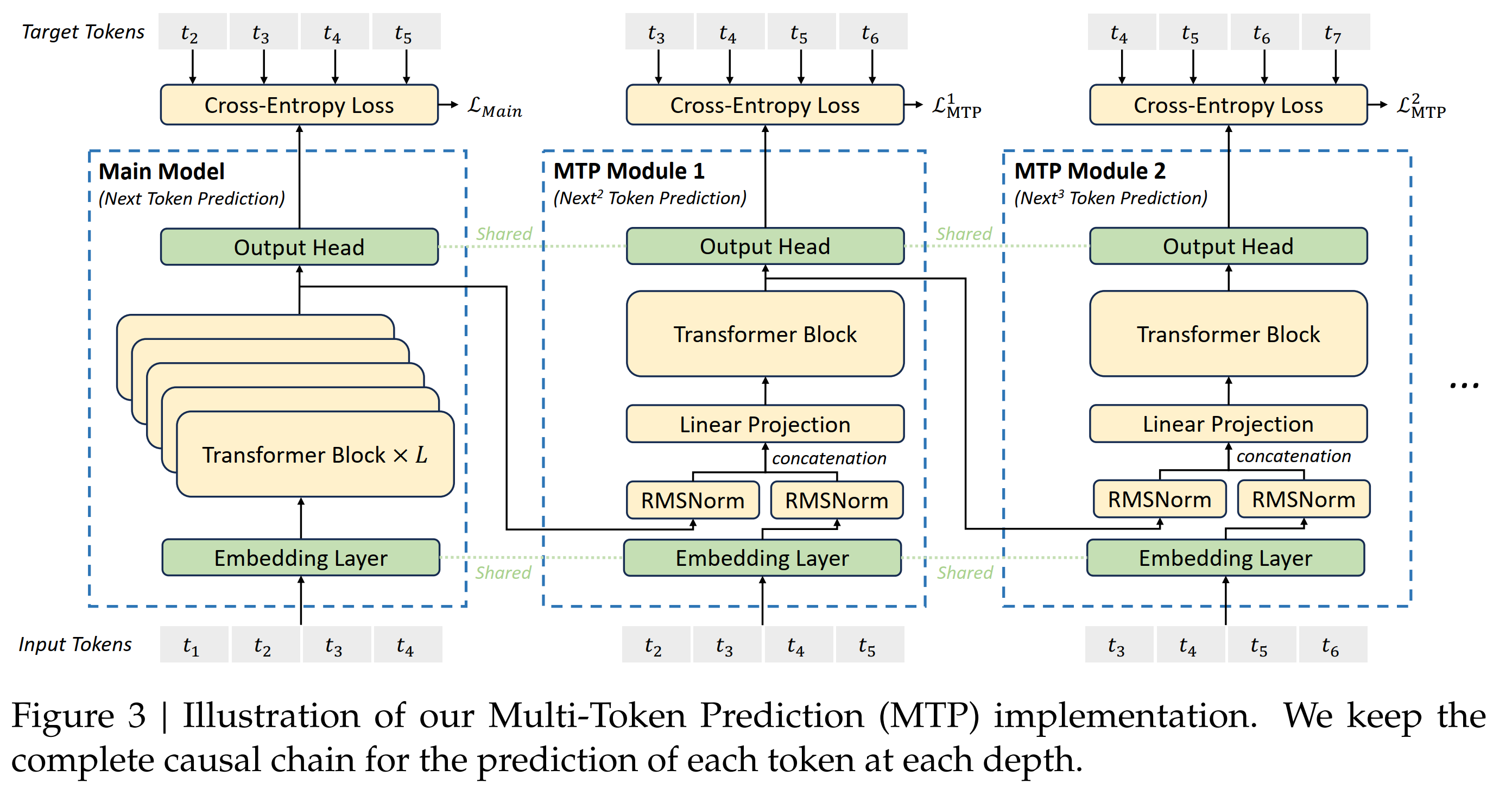
prediction:对于输入sequence的第 \(i\) 个token \(t_i\),在第 \(k\) 个prediction depth (也就是下面要 predict \(t_{i+k+1}\)),MTP module: 1)首先得到 \(i\)-th token 在第 \((k-1)\)-th 深度的表示 \(\mathbf{h}_i^{k-1} \in \mathbb{R}^{d}\), 以及第 \((i+k)\)-th 个 token 的 embediding \(Emb(t_{i+k}) \in \mathbb{R}^{d}\); 2)然后把他们concat起来(长度为 \(2d\)),再通过 RMSNorm 和 投影矩阵 \(M_k \in \mathbb{R}^{d \times 2d}\)} 来生成新的表示 \(h’^k_i = M_k [\text{RMSNorm}(\mathbf{h}_i^{k-1}); \text{RMSNorm}(Emb(t_{i+k}))]\);3)然后 \(\mathbf{h}’^k_i\) 作为输入到第 \(k\)-th 个transformer 模块 \(\text{TRM}_k(\cdot)\) ,生成当前深度的输出表示 \(\mathbf{h}^k_{1:T-k} = TRM_k(\mathbf{h}’^{k}_{1:T-k})\);最后使用 \(\text{OutHead}\) 将 \(\mathbf{h}^k_i\) 转换成预测概率 \(p_{i+k+1} = OutHead(\mathbf{h}^k_i) \in \mathbb{R}^{V}\)。
我的理解:
1) 传统的next token prediction:\(t_1\)-> \(h_1\) -> \(\hat{t}_2\), \(t_2\) -> \(h_2\) -> \(\hat{t}_3\), .... 也就是main model做的事情.
2) 在DS的 \(k\)-th MTP 模块中,模型会根据第 \((k-1)\)-depth 的 MTP representation \(h_i^{k-1}\) 和 token \(t_{i+k}\) 的embedding来的到 \(k\)-depth 的representaion \(\mathbf{h}_i^k\),从而更进一步来预测 \((k+1)\)-th token。下面用 \(k=1, 2, 3\) 作为例子来说明是怎么工作的。 具体来说, 对输入 token \(i\) :
在 \(k=1\) 的时候,先把 \(t_i\) 的representaion \(h_i^{k-1}=h_i^0\) (from main model) 和 token \(t_{i+1}\) (\(i+k=i+1\)) 的embedding concat在一起得到 \(h’^1_i\),然后输入 \(TRM_1\), 得到 \(\mathbf{h}^1_{1:T-1} = TRM_1(\mathbf{h}’^{1}_{1:T-1})\), 最后得到token \(t_{i+2}\) 的prediction 分布 \(p_{i+2}\)
在 \(k=2\) 的时候,先把 \(t_i\) 的representaion \(h_i^{k-1}=h_i^1\) (from \(k=1\) MTP module) 和 token \(t_{i+2}\) ( \(i+k=i+2\) ) 的embedding concat在一起得到 \(h’^2_i\),然后输入 \(TRM_2\), 得到 \(\mathbf{h}^2_{1:T-2} = TRM_2(\mathbf{h}’^{2}_{1:T-2})\), 最后得到token \(t_{i+3}\) 的prediction 分布 \(p_{i+3}\)
在 \(k=3\) 的时候,先把 \(t_i\) 的representaion \(h_i^{k-1}=h_i^2\) (from \(k=2\) MTP module) 和 token \(t_{i+3}\) ( \(i+k=i+3\) ) 的embedding concat在一起得到 \(h’^3_i\),然后输入 \(\text{TRM}_3\), 得到 \(\mathbf{h}^3_{1:T-3} = TRM_3(\mathbf{h}’^{3}_{1:T-3})\), 最后得到token \(t_{i+4}\) 的prediction 分布 \(p_{i+4}\)
MTP 的目标函数 对每个predict depth k,其损失函数仍然是cross-entropy,定义为 \(\mathcal{L}_{\text{MTP}}^k\) = \(\mathcal{L}_{\text{MTP}}^k\) = \(\text{CrossEntropy}(P_{2+k:T+1}^{k}, t_{2+k:T+1})\) = \(-\frac{1}{T} \sum_{i=2+k}^{T+1} \log p_i^k[t_i]\)。其中 \(T\) 是输入序列的长度, \(t_i\) 是输入序列的第 \(i\)-th 个真实值, \(p_i^k[t_i]\) 是第\(k\)-th 个 MTP 模块对 \(t_i\) 的prediciton probability.
最终 MTP 的损失函数是对所有的预测深度 (\(k\) 从1 到\(D\)) 的平均 乘以权重 \(\lambda\) ,\(\mathcal{L}_{\text{MTP}}\) = \(\frac{\lambda}{D} \sum_{k=1}^{D} \mathcal{L}_{\text{MTP}}^k\)
从DS的paper公式25看,\(\mathcal{L}_{\text{MTP}}\) 只是 MTP 的损失函数。最终的损失函数应该还要加上 \(\mathcal{L}_{\text{Main}}\)。
MTP 在推理的时候怎么用呢? MTP的主要目的是用来提高 main model的表现,在推理的时候,并不要使用MTP,而只是使用 main model来predict next token。
3. InfraStructures / 训练工程优化
3.1. Compure clusters
DS-V3 是在2048块H800上训练的,每个cluster有8块H800,nodes内通过NVLink和NVSwitch相连,nodes间通过InfiniBand来通信。
3.2. 训练框架
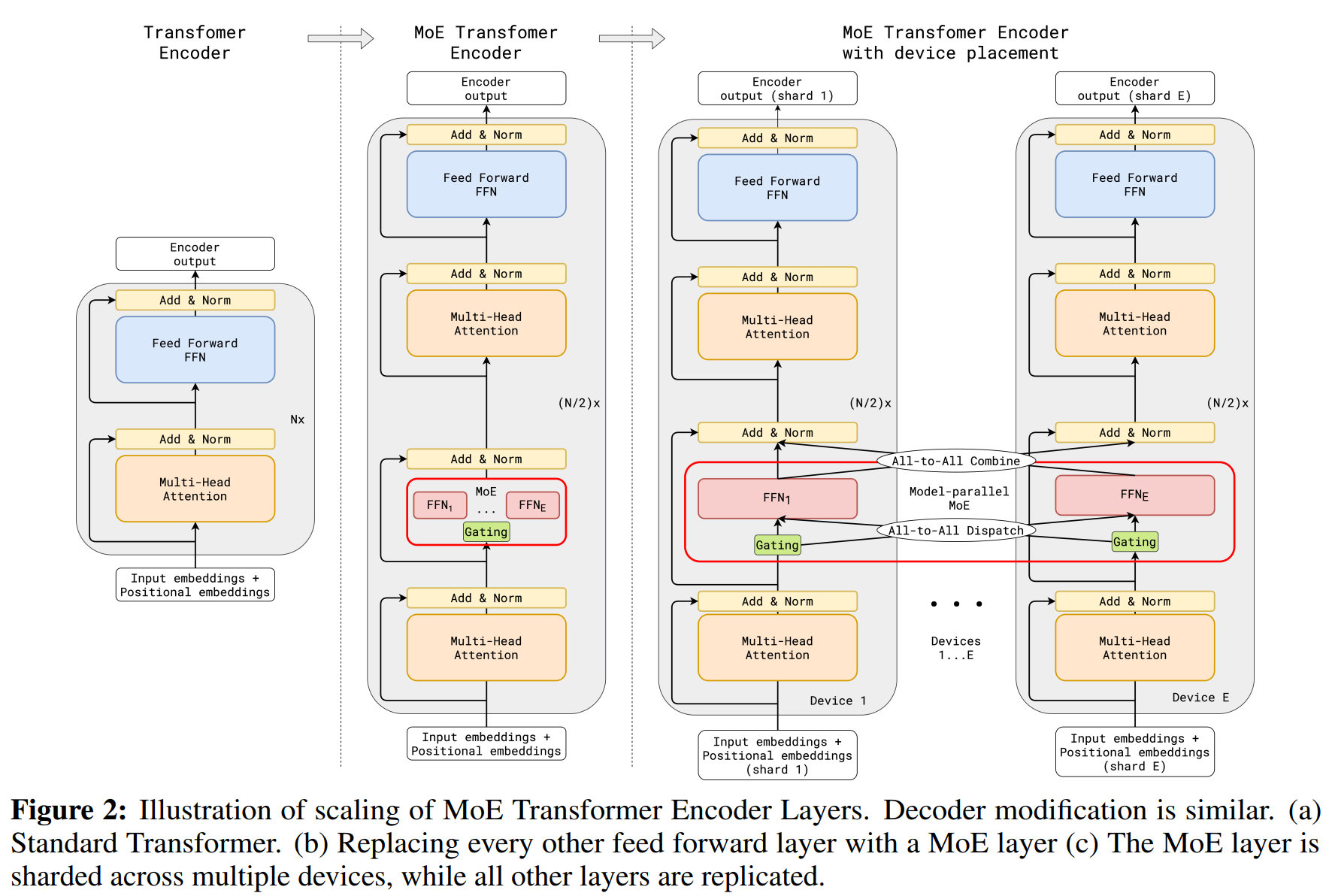
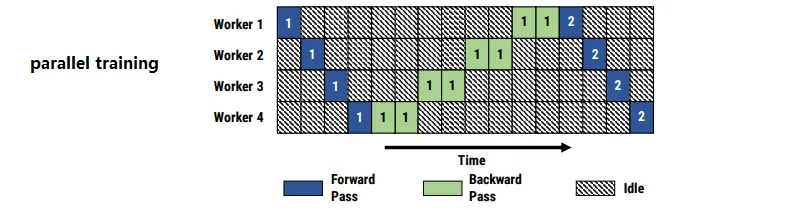
正常使用GPU进行训练的时候,有两个非常大的挑战:显存效率和计算效率,也就是显卡的显存和计算能力被使用了多少,有多少是浪费了。因为现在的模型太大,一张显卡或者一个cluster都放不下,所以通常需要把模型分散到不同的机器和显卡上。显卡,cluster组建集群参见kubernets的知识。为了把模型分散到不同的显卡上,通常有这么几个办法:1. Pipeline Parallelism / PP:这是对模型进行分割,对比较深的模型,模型的pipeline可以分到不同的显卡上。比如一个模型有32个transfomer,有八个显卡,那么可以每个显卡放4个,然后依次计算,这样可以使用micro-batch来充分的利用GPU。通常的PP会导致GPU闲置(见下图PP bubbles) 2. Tensor Parallelism / TP:这是对数据进行分割,对比较大的矩阵运算,可以分散到不同的显卡运算,这样既可以防止一张显卡容不下巨大的数据,也可以并行进行,加快速度。这些名字有时候不是很准确,其他还有Data Parallism, model parallelism. DS-V3因为有很多的Expert,所以他们还有 Expert Parallelism / EP。
PP bubbles:
| setup | scenario | strategy |
|---|---|---|
| single node/multi-GPU | fits on single GPU | DistributedDataParallel or ZeRO |
| doesn’t fit on single GPU | PipelineParallel, ZeRO or TensorParallel | |
| largest model layer doesn’t fit | TensorParallel or ZeRO | |
| multi-node/multi-GPU | fast inter-node connectivity (NVLink or NVSwitch) | ZeRO or 3D parallelism (PipelineParallel, TensorParallel, DataParallel) |
| slow inter-node connectivity | ZeRO or 3D parallelism (PipelineParallel, TensorParallel, DataParallel) |
DS-V3是基于HAI-LLM训练框架。DS-V3通过16路PP,64路EP分布在8个节点上,以及ZeRO-1 DP.
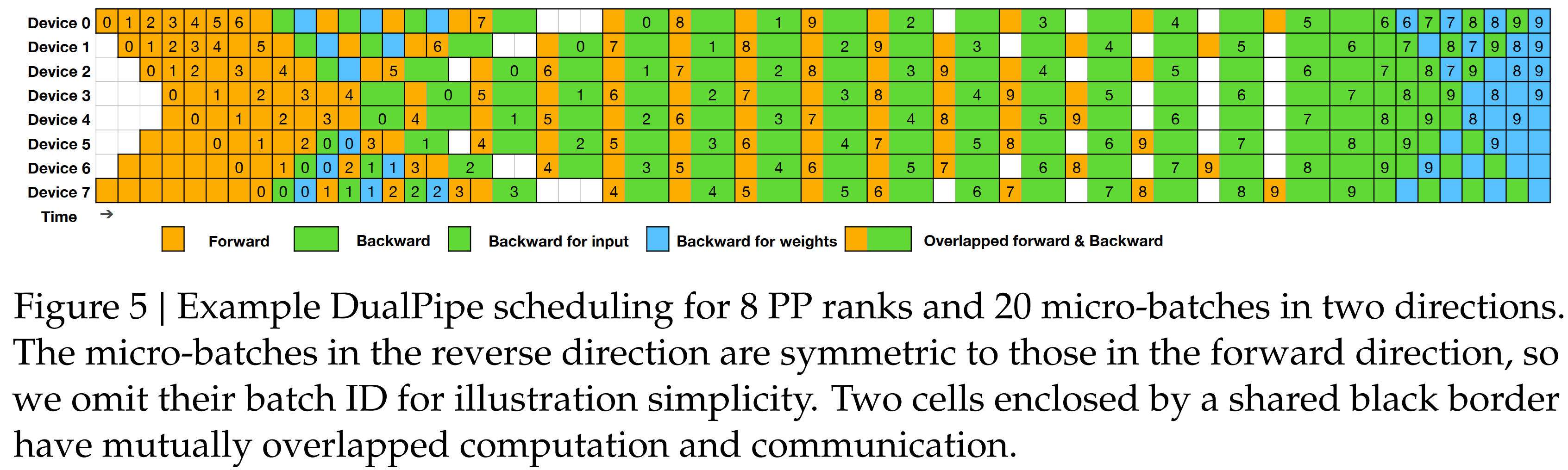
DS主要做了这三个工程优化:1. 设计了DualPile的办法来优化PP。DualPipe有更少的 pipeline bubbles(指GPU闲置),它将Forward和Backword过程的计算和通信阶段重叠起来,从而解决了跨节点专家并行性带来的沉重通信开销的挑战。2. 其次,开发了高效的 cross-node all-to-all 通信内核,充分利用 IB 和 NVLink 带宽,节省通信专用的 Streaming Multiprocessors (SMs)。最后,优化了训练过程中的内存占用,从而能够在不使用昂贵的 TP 的情况下训练 DeepSeek-V3。
3.2.1 DualPipe
在深度学习的大模型训练中,计算(Computation) 和 通信(Communication) 是两个关键环节。1. Computation: 主要指前向Forward 和 BackPropagation computation;2. Communication: 包括不同 GPU 或计算节点间的数据传输,如参数更新、梯度交换等。跨节点 Expert Parallelism 引入的通信开销导致计算与通信比率低效。DualPipe是一个双Pipeline的架构,在Pipeline的两端同时输入 Micro-Batches 的数据,这样 Forward 和 Backward 计算可以同步进行,减少 GPU 空闲时间。同时采用Computation与Communication重叠的策略,使得Forward 和 BackPropagation 的计算任务以及数据通信能够在时间轴上更紧密地交错。通过把Forward和Backward chunk成小块,然后调整GPU SMs的使用比例,一部分用于Computation,另一部分用于Communication。
DualPipe with less bubble
class DualPipeModel(nn.Module):
def __init__(self, dim, rank, world_size):
...
def forward_backward_pipeline(self, input_tensor):
# 创建两个 CUDA 流,一个用于计算,一个用于通信
compute_stream = torch.cuda.Stream()
comm_stream = torch.cuda.Stream()
# Forward Pass
with torch.cuda.stream(compute_stream):
attn_out = self.attention(input_tensor)
mlp_out = self.mlp(attn_out)
# Backward Pass
with torch.cuda.stream(compute_stream):
loss = mlp_out.sum()
loss.backward()
# All-to-All Dispatch & Combine
with torch.cuda.stream(comm_stream):
tensor_to_send = input_tensor.clone()
received_tensor = torch.zeros_like(input_tensor)
# All-to-All
dist.all_to_all_single(received_tensor, tensor_to_send)
# synchronize
compute_stream.synchronize()
comm_stream.synchronize()
return received_tensor
3.2.2. Cross-Node All-to-All Communication
这一部分牵涉到更底层的工程细节,包括传说中的通过Nvidia的底层语言 PTX (Parallel Thread Execution) 来控制GPU的线程执行,减少通信对计算的影响,实现更高效的GPU利用,以及怎么充分利用集群的网络拓扑结构(IB & NVLink)。DS-V3 的原始paper里面也更多的是high-profile的描述而没有太多的细节。总体的思路是因为节点间IB的带宽比节点内NVLink的带宽要低,所以要想办法来合理分配通信路径,减少IB带宽的阻碍。
为了对 Cross-Node All-to-All Communication(包括 Dispatching 和 Combining)进行优化,DS设计了优化的网络拓扑结构(IB & NVLink)。在 dispatching 的时候,MOE gating algorithm 决定每个token 会被发送到哪些 Expert,每个 token 先通过 IB 发送到目标 node,然后再通过 IB-to-NVLink 将数据发送到最终的GPU。前面在模型架构已经提到,每个 token 最多发送给4个Node(NVLink的带宽为160GB/s,IB为50GB/s,大概是3.2倍,所以到了Node,token还能平均有3.2个Expert)。在 Combining 的时候反过来,每个 Expert 通过 NVLink 汇总数据的结果,然后通过 NVLink-to-IB 到 node汇总,IB 的接受和汇总同样由动态调整的warp处理。
3.2.3. Minimal Overhead
这一部分讲的怎么节省GPU内存的开支。第一个是在back propagaton的时候从新计算RMSNorm和升维投影,这样就不需要储存他们的值。第二个是咋Exponential Moving Average (EMA) 计算模型表现的时候,EMA参数放到CPU内存。第三个是在multi-token预测的时候,共享Embedding和Output Head的参数。
3.3. FP8 Training
首先加一个FP的知识,计算机用二进制表示浮点数,是分为正负号(Sign)、指数部分(exponent)、尾数部分(mantissa)三部分的,完整的表示为 \(X = (-1)^s \times 2^E \times M\). 近似的可以认为:FP32和FP16比,FP越长,精度越高。在某些精度下已经等于0的数字,在更高的精度下就不是0,这样的话计算就不容易出现错误。但是更高的精度就需要更多的内存来存储,但是GPU通常内存有限。所以这也是一个需要优化的地方。
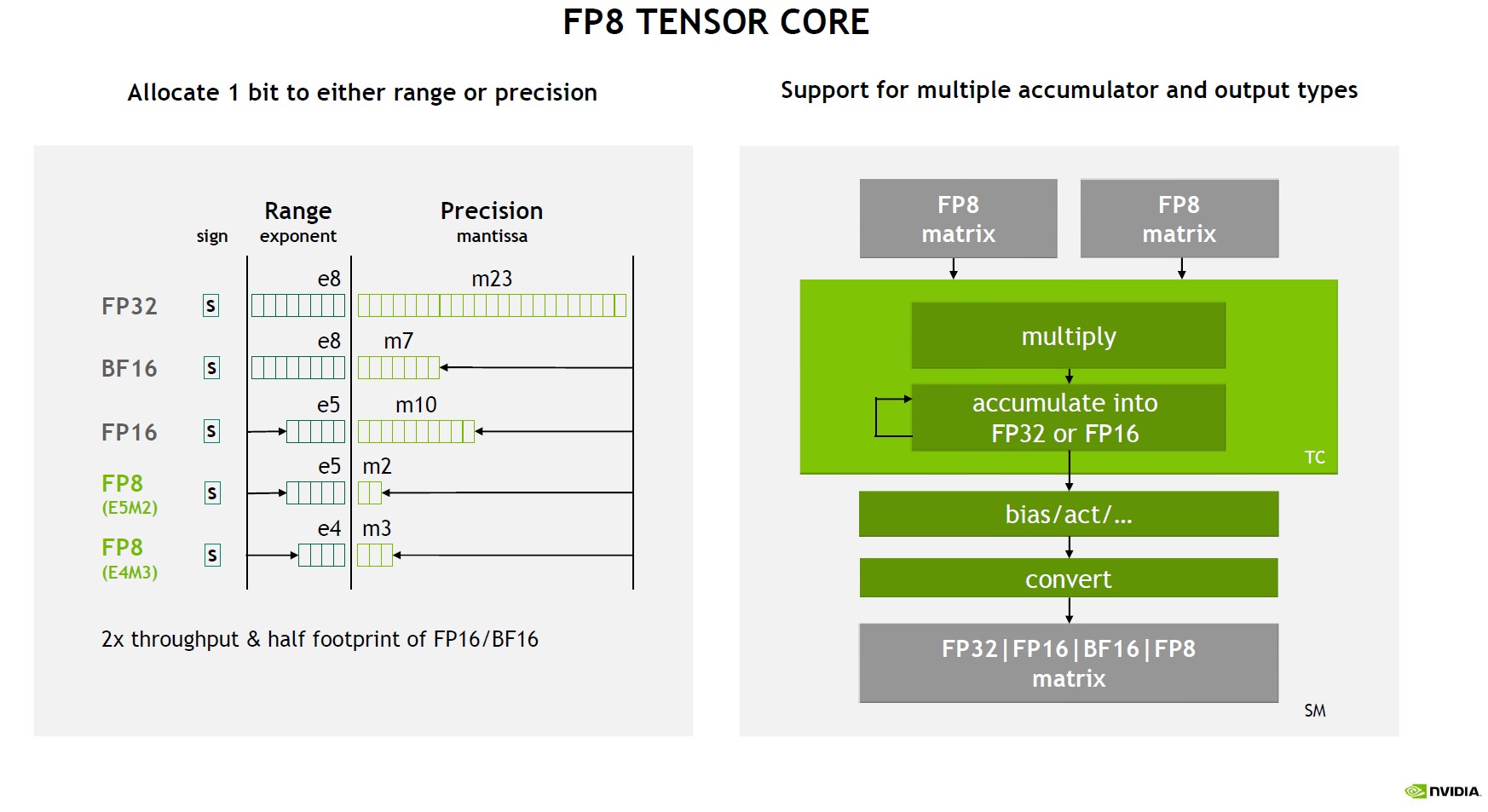 Fig. NVIDIA FP8 Tensor Core
Fig. NVIDIA FP8 Tensor Core
3.3.1. Mixed Precision Framework
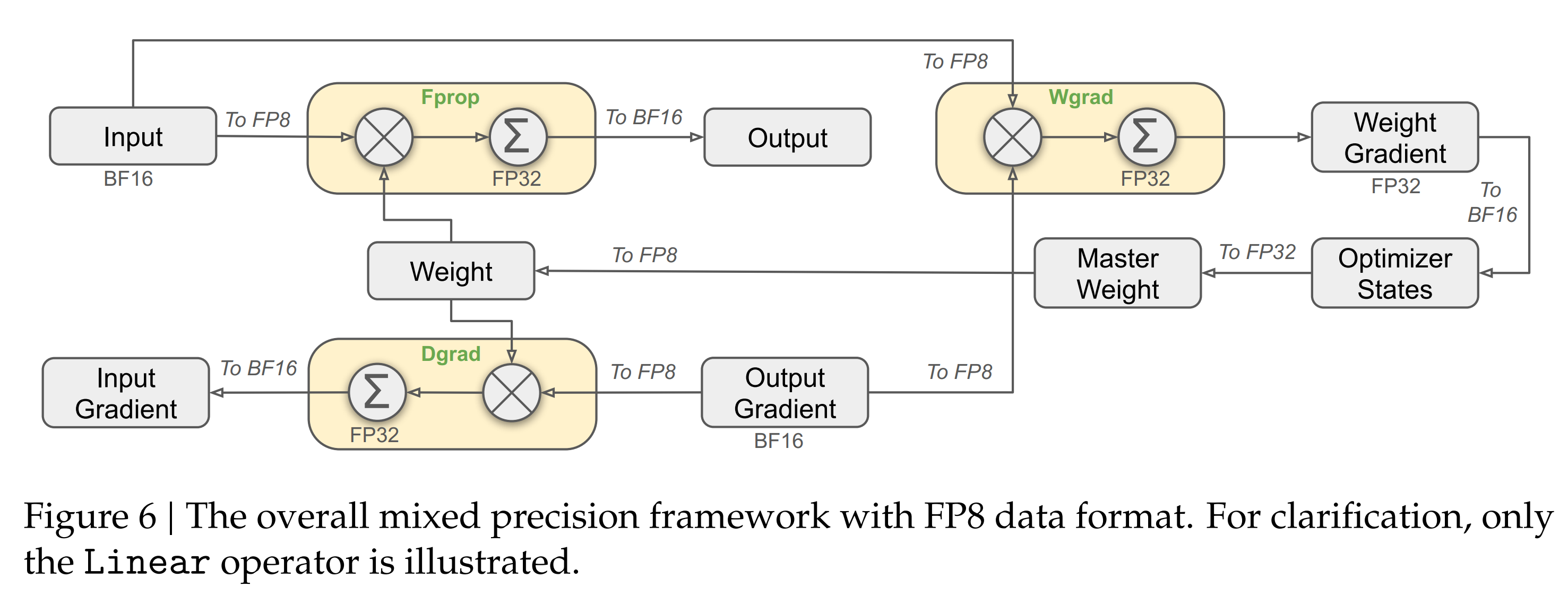
DS-V3 使用混合精度的FP8,大部分需要很多计算的地方都是FP8,但是在少量重要的操作上保留了原来的精度,具体见下图。1. 在GEMM矩阵相乘的时候,输入是FP8输出是BF16或者FP32. 在下图,在forward pass,activation backward pass和weight backward pass这几步矩阵相乘都是FP8的输入精度,理论上这样跟BF16比可以快一倍。在需要高精度的地方,比如embedding,output head,MOE gating module,normalizaiton,以及attention等等,仍然保持高精度。
Mixed Precision
3.3.2. Improved Precision from Quantization and Multiplication
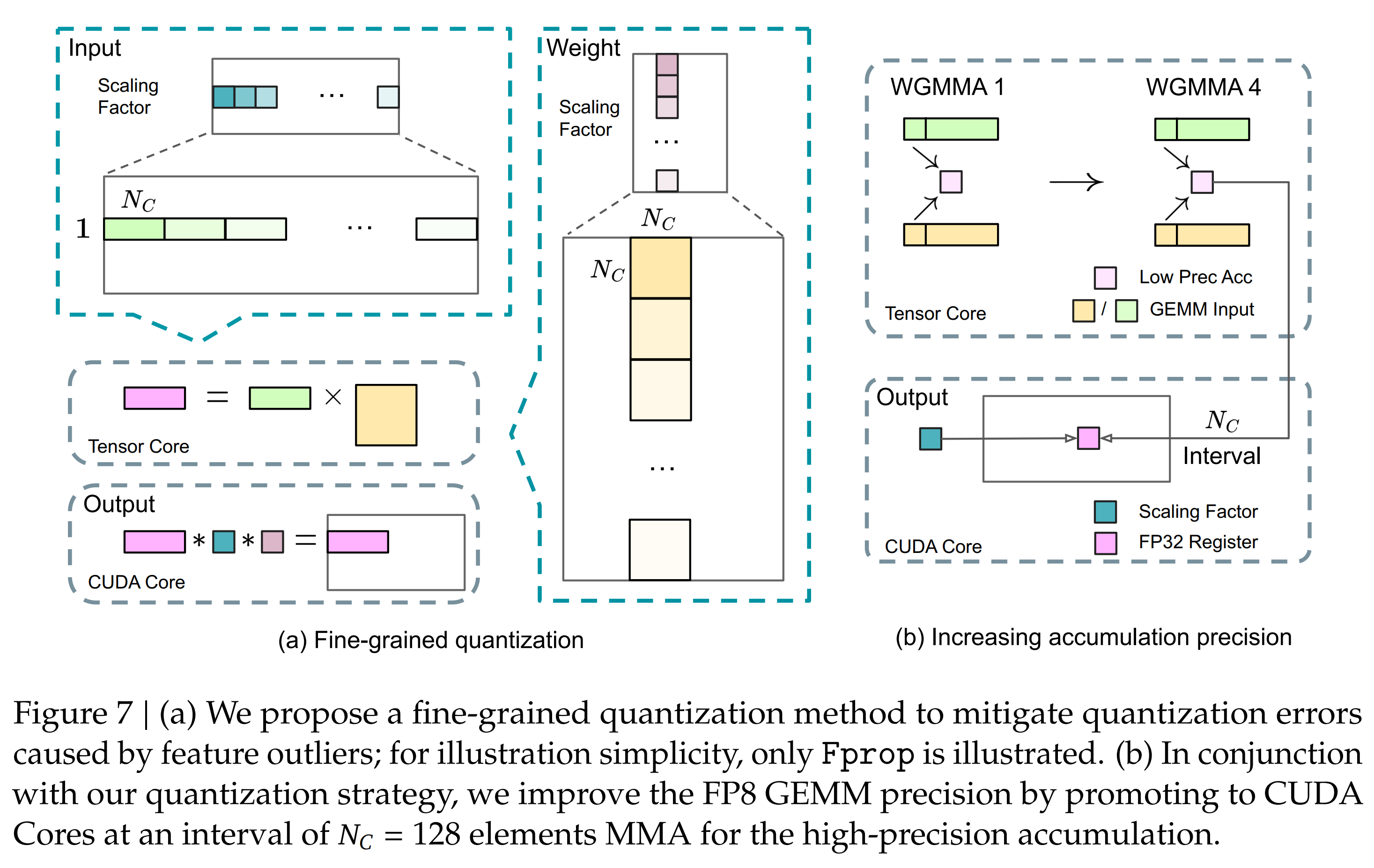
Fine-Grained Quantization 主要是为了解决低精度训练中 overflow 和 underflow 的问题。这些问题主要来源于 FP8 格式受限的动态范围,特别是 FP8 指数位减少导致的表示范围受限。为了解决这个问题,Fine-Grained Quantization 采用了一种更精细的量化方法,在更细粒度上进行 scaling:对activations,采用 \(1 \times 128 \text{ tile-based scaling}\),每个tile分别计算scaling; 对于weights,采用 \(128 \times 128 \text{ block-based scaling}\),每个bloack单独计算scaling factor。这样避免模型的参数会被outliers主导从而导致训练失败。在进行低精度FP8的矩阵运算 MMA (Matrix Multiply-Accumulate) 的时候,把计算的结果先累积在Tensor Core(FP8),当计算达到一定量的批次(\(N_c\))的时候,将部分结果提升到 CUDA Core(FP32),这样在保持高throttle的同时,提高了最终的计算精度。
3.4. Inference and Deployment
Stay tuned!